Disclaimer: Il contenuto di questo post è un estratto della mia tesi di laurea, realizzata nel 2006. Alcuni esempi potrebbero risultare obsoleti, tuttavia la componente teorica resta un buon riferimento per chi deve approcciarsi alla materia.
Cosa sono i dispositivi aptici
Negli anni settanta e ottanta la ricerca nel campo della robotica ha iniziato a dirigere la sua attenzione verso la percezione e la manipolazione tattile per la creazione di robot autonomi; negli anni novanta invece la presenza di nuove tecnologie ha permesso la nascita della computer haptics, cioè una virtualizzazione che, come nella computer graphics, permette di simulare oggetti in maniera interattiva. Sebbene Knoll abbia dimostrato già negli anni sessanta la possibilità di eseguire una interazione aptica con semplici oggetti, solo le tecnologie recenti hanno reso possibile la realizzazione di tale interazione con oggetti sempre più complessi, combinando insieme dispositivi ad alte prestazioni, modelli di calcolo geometrici, tecniche di rilevamento delle collisioni e comprensione del sistema tattile umano.
I dispositivi aptici si comportano come piccoli robot che effettuano uno scambio di energia con l’utente; in particolare permettono all’utente di interagire con un ambiente virtuale ricevendo un feedback tattile, ottenuto applicando delle forze opposte al movimento dell’utente lungo i tre assi xx, yy e zz. La caratteristica principale che li distingue dalle altre tipologie di dispositivi è la loro bidirezionalità, cioè la possibilità di ricevere informazioni dall’utente e di inviare informazioni all’utente. Infatti, durante il normale utilizzo di un tale dispositivo, l’uomo imprime una forza al meccanismo aptico (uno stilo, un ditale o un altro componente diverso a seconda del tipo di interfaccia) e ne cambia la posizione; successivamente è il dispositivo a riflettere una forza calcolata in base al movimento al quale è stato sottoposto.
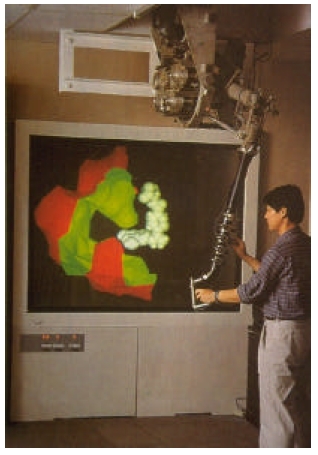
I Bilateral Master–Slave Manipulator (MSMs) fanno parte dei primi dispositivi aptici sviluppati e venivano impiegati nell’industria nucleare per manipolare in modo sicuro e remoto il materiale irradiato. Il termine MSMs deriva dal fatto che il braccio meccanico master è tipicamente una riproduzione di un braccio remoto slave, e i due sono legati da catene, cavi o altri sistemi elettromeccanici. Un altro dei primi usi dei bracci meccanici master è avvenuto nell’ambito della realtà virtuale per la manipolazione delle molecole e l’interazione aptica con la simulazione della forza elettrostatica molecola–substrato; un esempio di questo è mostrato in figura (Stone, R. J., 2000):
Altri progetti importanti sono stati sviluppati nel campo del force feedback per la chirurgia, come il progetto IERAPSI dello European Union Framework, un ambiente per le prove e la pianificazione degli interventi chirurgici, oppure nel campo militare per il training sul rilevamento e disinnesco delle mine.

Il termine aptico (dal greco haptesthai che significa toccare) indica la parte di fisiologia inerente il senso del tatto, mentre con feedback aptico (haptic feedback) si indica sia la consapevolezza degli stimoli ricevuti in conseguenza di un contatto con una superficie, sia le informazioni cinetiche ricevute in base alla posizione e al movimento del corpo. Lo scambio bidirezionale di informazioni con un dispositivo aptico viene chiamato percezione aptica (haptic perception).
In figura è riportato lo schema di un’interazione aptica:
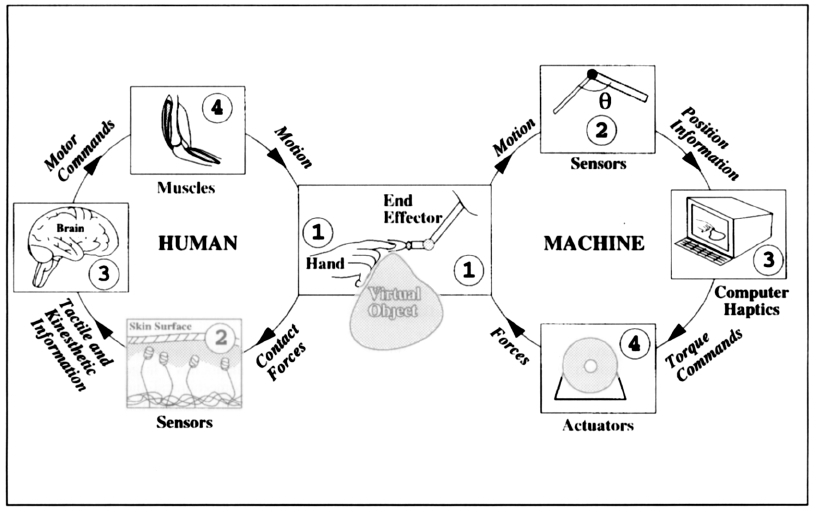
nella parte sinistra si vede come avvengono le elaborazioni all’interno del corpo umano: i recettori posti sulla pelle ricevono le informazioni sulla forza e le trasmettono al cervello, il quale comanda poi i muscoli del braccio e della mano. Il dispositivo invece (parte destra) rileva il moto attraverso dei sensori che inviano i dati sulla posizione al computer al quale il dispositivo stesso è collegato; quest’ultimo elabora i dati ricevuti e invia i comandi di torsione agli attuatori che generano la forza di resistenza nel dispositivo.
Tipi di dispositivi
I dispositivi aptici possono essere distinti in base al loro posizionamento:
Dispositivi ground based
I dispositivi ground based sono quelli che vengono appoggiati ad un tavolo di lavoro e includono i joystick che riflettono le forze e le interfacce aptiche desktop, come il Phantom Omni o il Phantom Desktop di SensAble Tecnologies.
Esoscheletri meccanici
Gli esoscheletri meccanici sono dei dispositivi che vengono indossati dall’utente su braccia o gambe.
](https://techisfun.github.io/images/esoscheletro.jpg)
Guanti force feedback
I guanti force feedback leggono le informazioni di contatto delle singole dita e restituiscono le forze di resistenza, ma non possono riprodurre sensazioni di oggetti pesanti o inerzie

Un altro tipo di distinzione è tra dispositivi a impedenza o ammettenza: i primi leggono informazioni relative alla posizione e inviano in output informazioni sulle forze, i secondi leggono le forze e inviano i dati sulla posizione. Il terzo modo di classificare i dispositivi è in base ai gradi di libertà che caratterizzano il loro movimento:
Dispositivi ad un grado di libertà
Misurano e applicano le forze lungo una sola direzione. Esempi di movimenti reali ad un grado di libertà includono l’apertura di una porta, l’uso di un paio di forbici o la pressione del pistone di una siringa. La simulazione aptica ad un grado di libertà più comune è il muro virtuale, che corrisponde al rendering di una forza che si manifesta al contatto con una superficie molto rigida.
Dispositivi a due gradi di libertà
Il mouse è un semplice esempio di dispositivo a due gradi di libertà; possono essere utilizzati per interagire con oggetti tridimensionali mappando opportunamente i punti di contatto a tre gradi di libertà su un piano.
Dispositivi a tre gradi di libertà
In questo caso la mappatura dallo spazio tridimensionale del dispositivo a quello virtuale è più immediata, in quanto ogni componente della posizione nel sistema di riferimento solidale al dispositivo deve essere trasformata nella corrispondente componente nel sistema di riferimento virtuale. Nell’interazione con gli oggetti virtuali il modulo della forza è calcolato in base a quanto il dispositivo penetra l’oggetto, mentre per il calcolo della direzione sono stati sviluppati vari metodi, tra i quali quello maggiormente utilizzato è l’algoritmo del proxy.
Dispositivi a più di tre gradi di libertà
Per rendere più realistici gli scenari virtuali si è reso necessario introdurre la possibilità di effettuare torsioni. Barbagli (Barbagli, F., Salisbury, K., & Devengenzo, R., 2003) ha scritto un algoritmo che supporta l’interazione con un punto di contatto con frizione e momenti per simulare quattro gradi di libertà; la simulazione di cinque gradi di libertà (come nel caso del contatto tra un segmento e un oggetto) è stata implementata da Basdogan (Basdogan, C., Ho, C. H., & Srinivasan, M. A., 1997), mentre studi sulle interazioni a sei gradi di libertà sono stati eseguiti da McNeely (McNeely, W., Puterbaugh, K., & Troy, J., 1999) e Otaduy e Lin (Otaduy, M.A. & Lin, M., 2003).
Caratteristiche e prestazioni dei dispositivi
Le prestazioni dei vari tipi di dispositivi dipendono dalle abilità e limitazioni umane e dell’utente; le simulazioni di oggetti e ambienti virtuali sono sempre basate su calcoli approssimati, e sono proprio le limitazioni della sensibilità dell’utente a determinare se tali approssimazioni sono sufficienti. Le caratteristiche che un’interfaccia aptica dovrebbe possedere sono (Srinivasan, M. A. & Basdogan, C., 1997):
- Livelli di inerzia e frizione bassi, assieme ad assenza di costrizioni cinematiche imposte dal dispositivo, in modo tale che il movimento libero sia avvertito effettivamente come tale (in altre parole, l’utente non deve avvertire forze di resistenza quando queste non vengono simulate dall’applicazione).
- La risoluzione, sia in termini di posizione che di forza riflessa, deve corrispondere a quella del sistema tattile umano e dipende dal processo nel quale viene impiegato il dispositivo. In particolare l’utente:
- non deve poter attraversare gli oggetti applicando una forza eccessiva;
- non deve avvertire vibrazioni non volute (come quelle dovute a quantizzazioni);
- non deve avvertire come elastici gli oggetti che invece sono rigidi e viceversa.
- Ergonomia e comfort: i dispositivi non devono arrecare disturbi all’utente che li indossa o li utilizza, in quanto tali disturbi potrebbero sovrastare tutte le altre sensazioni, in particolare quelle aptiche.
Struttura di una pipeline di rendering aptico
La struttura di una pipeline di rendering aptico è relativamente semplice.
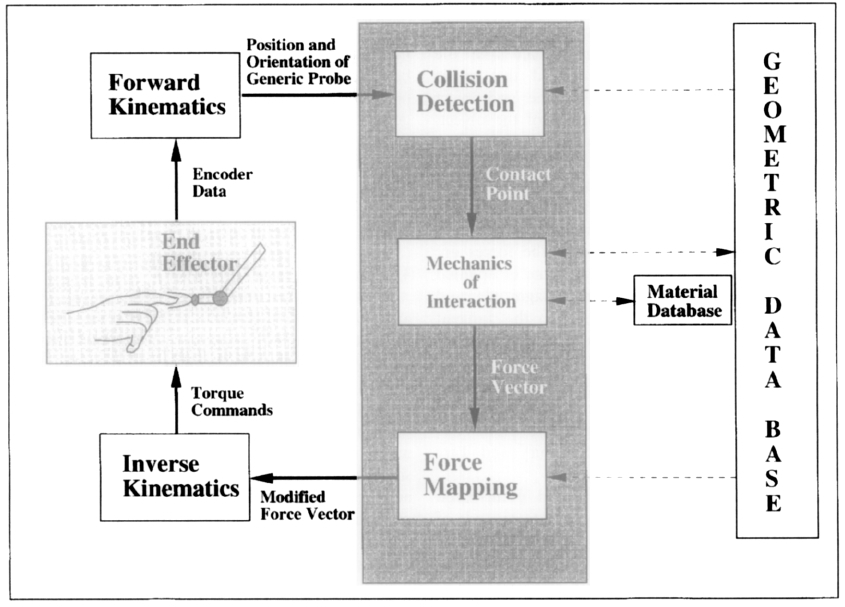
Quando l’utente muove la sonda del dispositivo, i nuovi valori di posizione e orientazione vengono catturati dai codificatori; successivamente vengono rilevate le eventuali collisioni con gli oggetti virtuali: se la sonda entra in contatto con un oggetto, viene calcolata la forza di reazione in base alla profondità della penetrazione della sonda nell’oggetto. La forza calcolata viene poi mappata sulla superficie dell’oggetto in modo da tenere in considerazione i dettagli di quest’ultimo; il vettore delle forze così modificato viene inviato al dispositivo e, tramite questo, all’utente.
Le diverse tecniche di rendering possono essere distinte a seconda del tipo di interazione in point based e ray based:
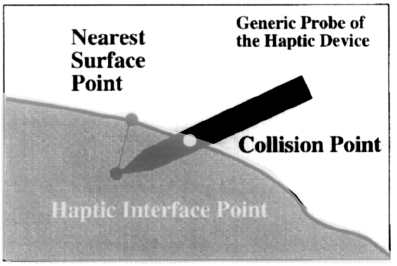
- Con l’interazione point–based solo l’estremità del dispositivo (HIP, haptic interface point) entra in contatto con gli oggetti. Dato che questi hanno una rigidità finita, il punto HIP li penetra e la profondità della penetrazione è calcolata come la minima distanza tra HIP e superficie dell’oggetto virtuale.
- Nell’interazione ray–based la sonda è modellata come un raggio finito; l’algoritmo di collisione individua come punto di contatto l’intersezione tra il raggio e la superficie dell’oggetto, mentre come profondità della penetrazione si considera la distanza tra HIP e punto di collisione lungo la normale alla superficie.
In entrambi i casi la forza è calcolata usando la legge di Hooke F=kxF=kx, dove xx è la stessa direzione lungo la quale viene calcolata la profondità di penetrazione; se le interazioni sono prive di forze di frizione, la forza di reazione è normale alla superficie nel punto di contatto.
Zilles e Salisbury (Zilles, C. B. & Salisbury, J. K., 1995) hanno sviluppato un algoritmo più sofisticato per il rendering delle forze basato sulla tecnica point–based; hanno definito un nuovo punto, detto god–object o proxy, rappresentante la locazione sulla superficie del punto di contatto che viene calcolato ogni volta che il dispositivo viene mosso, con il vincolo ulteriore che la distanza tra god–object e HIP deve essere minimizzata, mentre il god–object resta sempre sulla superficie dell’oggetto anche quando il punto HIP lo penetra.
Un approccio più semplice consiste nel calcolare un’approssimazione della superficie come un piano tangente al punto di contatto; tale piano viene aggiornato ad una frequenza inferiore a quella propria del rendering delle forze, pertanto può portare a sentire delle discontinuità se il dispositivo viene mosso su grandi distanze prima che il piano venga aggiornato.
Un’altra tecnica consiste nel considerare gli oggetti virtuali come volumi formati da voxel (elementi di volume rappresentanti un valore su una griglia regolare nello spazio tridimensionale); ad ogni voxel vengono associati otto byte di informazioni, includenti i valori di densità del materiale, gradiente di densità, colore e altre proprietà aptiche come viscosità ed elasticità. Quando il punto HIP si trova all’interno dell’oggetto, il valore scalare di densità al punto di contatto viene usato per calcolare la forza di reazione attraverso delle trasformazioni lineari, mentre il valore di gradiente della densità viene usato per determinare la direzione normale alla superficie.
Basdogan ha sviluppato una tecnica di rendering ray–based (Basdogan, C., Ho, C. H., & Srinivasan, M. A., 1997) nella quale le coordinate delle due estremità della sonda vengono aggiornate ad ogni movimento, rilevando ogni collisione tra il raggio e l’oggetto virtuale e calcolando la forza secondo la legge di Hooke. Il rilevamento delle collisioni avviene in tre passi: per prima cosa viene rilevata la collisione tra il raggio e lo spazio rettangolare contenente l’oggetto virtuale, poi tra il raggio e lo spazio che circonda un qualsiasi elemento triangolare; infine viene rilevato il contatto tra il raggio e l’elemento triangolare usando calcoli geometrici. La divisione in più passi porta ad un aumento di prestazioni consentendo di lavorare a frame rate più elevati.
Rendering dei dettagli della superficie
Esistono diverse tecniche per effettuare il rendering dei dettagli della superficie, diverse a seconda del tipo di sensazione che deve essere data: superficie smussata, superficie con tessitura o superficie con frizione.
Rendering di superfici smussate
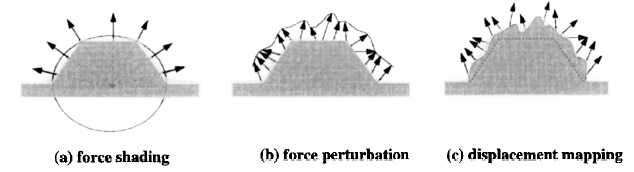
Quando gli oggetti vengono rappresentati tramite insiemi di poligoni, l’utente non percepisce la forma che si intendeva rappresentare, ma avverte i lati e gli angoli dei vari poligoni. Per minimizzare tale effetto Morgenbesser e Srinivasan (Srinivasan, M. A. & Morgenbesser, H. B., 1996) hanno elaborato una tecnica chiamata force shading: con tale metodo il vettore della forza viene interpolato lungo la superficie in modo che la sua direzione vari con continuità, di conseguenza l’utente avverte una superficie più smussata rispetto alla sua rappresentazione originale. Diventa così possibile sviluppare modelli geometrici di diverso livello di dettaglio ed effettuare poi il rendering con il modello di forza dettagliato o con il modello force–shaded a seconda dei requisiti dell’applicazione.
Il force shading potrebbe diventare poco efficiente quando gli angoli tra i poligoni che rappresentano una superficie sono al di sotto di un certo valore; in questo caso è sufficiente diminuire il numero di poligoni utilizzati fino a quando gli angoli tra questi sono tutti maggiori del valore critico.
Rendering delle tessiture aptiche
Srinivasan e Basdogan (Srinivasan, M. A. & Basdogan, C., 1997) hanno sviluppato due metodologie per il rendering delle tessiture di superfici tridimensionali che prendono spunto da quelle usate nella computer graphics:
- Perturbazione delle forze: La perturbazione delle forze consiste nel modificare la direzione e il modulo del vettore delle forze per generare effetti sulla superficie (come la ruvidità). Max e Becker (Max, N. L. & Becker, B. G., 1994) hanno sviluppato una formula che permette di generare delle ruvidità visuali, basandosi sulla normale alla superficie originale: M=N−∇h+(∇h⋅N)NM=N−∇h+(∇h⋅N)N dove MM è la normale modificata, NN è la normale originale e ∇h∇h è il gradiente della profondità della tessitura. Lo stesso metodo può essere usato per generare la ruvidità aptica.
- Displacement mapping: In questo caso, invece di modificare il vettore delle forze, viene modificata la geometria della superficie. Per generare micro–tessiture è necessario che la superficie sia composta da un numero elevato di poligoni, in modo tale da rendere possibile la sua modifica punto per punto; tutto ciò però incrementa considerevolmente il carico computazionale. Usare questa tecnica per il rendering aptico comporta ulteriori problemi: gli oggetti virtuali non possono essere infinitamente rigidi, perciò il dispositivo penetra all’interno della superficie; oppure il rilevamento delle collisioni o la localizzazione dei punti sulla superficie ogni volta che la sonda viene mossa crea ambiguità dovute all’esistenza di micro–dettagli, portando a delle discontinuità delle forze. Si capisce come il displacement mapping sia più indicato per il rendering di macro–tessiture.
Altre tecniche invece si basano sull’uso della frequenza e della profondità delle tessiture:
- Tessiture aptiche basate sulle immagini: L’idea consiste nell’utilizzare le informazioni dell’immagine bidimensionale usata come texture dell’oggetto virtuale; assumendo che le intensità di grigio dell’immagine possano essere usate direttamente come indicatori della profondità della tessitura aptica, possiamo associare ogni coordinata della texture (u,v)(u,v) alle coordinate di ogni vertice (x,y,z)(x,y,z). Viene poi calcolato il gradiente della profondità al punto di collisione e il vettore della forza è perturbato di conseguenza.
- Tessiture aptiche procedurali: L’obiettivo è generare le tessiture aptiche mediante funzioni matematiche, usandole poi per modificare il gradiente ∇h∇h e la forza di reazione al punto di contatto, o per modificare la geometria dell’oggetto; un esempio è la simulazione di tessiture stocastiche (Fritz, J. P. & Barner, K. E., 1996).
Rendering delle superfici con frizione
L’aggiunta di forze di frizione rende la simulazione aptica più realistica; ad esempio, senza frizione non saremmo in grado di premere un pulsante virtuale in quanto il dispositivo scivolerebbe su di esso.
Molti ricercatori hanno proposto l’utilizzo di frizioni di Coulomb o frizioni viscose; le prime hanno una componente di frizione statica e una di frizione dinamica, mentre le altre sono dipendenti dalla velocità. Entrambi i tipi esercitano una forza opposta e tangenziale al punto di contatto. Se la misurazione della velocità di contatto è affetta da rumore o i cambiamenti di posizione sono troppo veloci, l’interazione aptica potrebbe diventare instabile.
Generazione di tessiture casuali con il metodo stocastico
Definiamo spazio di tessitura un volume di tessitura rappresentato da vettori tridimensionali; un campione in un punto qualsiasi è un vettore tridimensionale senza vincoli su modulo o direzione. Questo spazio continuo viene generato tramite vari processi che possono essere deterministici, stocastici o misti.
Le caratteristiche di una tessitura possono essere descritte tramite il suo spettro di potenza, e variando lo spettro si ottengono diverse tessiture.
Modelli stocastici
I modelli stocastici sono caratterizzati da misure statistiche di una immagine di texture; spesso sono sufficienti le misure di basso ordine. Il pattern della texture viene sintetizzato applicando ad un rumore bianco un filtro basato sulla funzione di autocorrelazione.
Dato che l’obiettivo non è simulare tessiture reali, bensì tessiture che siano percettibilmente diverse l’una dall’altra, è possibile generare le texture proprio processando un rumore tramite un filtro. Il rumore deve essere a banda limitata (rumore rosa), stazionario (invariante rispetto alla traslazione), isotropico e non deve essere periodico; il rumore bianco filtrato possiede queste proprietà. In particolare si considera il rumore bianco gaussiano: una trasformazione di un vettore casuale gaussiano resta gaussiano ed è completamente definito dalle sue statistiche di primo e secondo ordine. Semplicemente modificando la varianza (e di conseguenza lo spettro di potenza) è possibile ottenere tessiture che vanno da lisce a ruvide (Siira, J. & Pai, D. K., 1996).
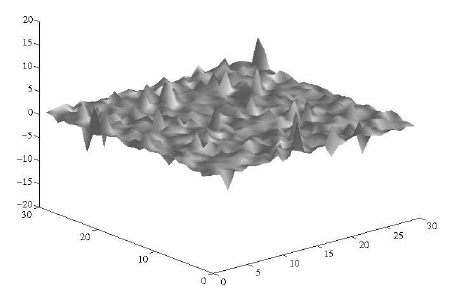
Per tessiture complesse si può utilizzare una pdf (probability density function) ottenuta da varie pdf gaussiane: f(x)=∑Mi=1aiN(μi,Ci),f(x)=∑i=1MaiN(μi,Ci), dove ∑Mi=1ai=1∑i=1Mai=1 e N(⋅)N(⋅) è l’i-esima pdf gaussiana con media μiμi e matrice di covarianza CiCi; i termini aiai possono essere variati arbitrariamente, o modellati in base a tessiture reali. In figura è rappresentata una texture bidimensionale composta da due pdf gaussiane.
Tutte queste metodologie producono campioni indipendenti e identicamente distribuiti, ottenendo così uno spettro di potenza costante; per modificare tale spettro è sufficiente filtrarlo con tecniche che affiancano trasformazioni statistiche al normale filtraggio. Un esempio è costituito dal moto Browniano visto nel paragrafo [sec:tessiture_superficie]{reference-type=”ref” reference=”sec:tessiture_superficie”}, un processo invariante rispetto alla scala descritto da un parametro di auto–similarità hh e uno spettro di potenza di tipo 1/f1/f (Ebert, D. S., Musgrave, F. K., Peachey, D., Perlin, K., & Worley, S., 1994) (Haruyama, S. & Barsky, B. A., 1984).
Procedure implicite e sintesi spettrale di Fourier
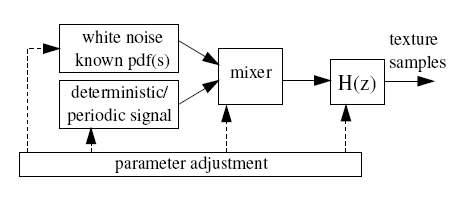
La creazione di uno spettro di potenza è possibile anche tramite procedure implicite, usando ad esempio delle sinusoidi, che nel dominio della frequenza diventano degli impulsi. Dalla teoria di Fourier si sa che ogni segnale periodico può essere visto come somma di infinite sinusoidi: così la creazione di una texture diventa un procedimento di sintesi spettrale di Fourier. Le caratteristiche dello spettro vengono modificate modulando l’ampiezza e la frequenza delle sinusoidi, mentre altri effetti spaziali possono essere ottenuti con variazioni di fase. Possono essere utilizzate anche altre funzioni, come dente di sega o onde quadre, le quali aggiungono componenti in alta frequenza ad intervalli armonici; segnali di questo tipo diventano delle vibrazioni in un’interfaccia aptica, fatto che può rendere più realistica la tessitura.
Se il periodo dei segnali è sufficientemente ampio, le funzioni periodiche possono essere usate per creare tessiture che appaiono casuali. Un altro modo per creare tessiture casuali con funzioni periodiche è l’uso di un processo stocastico: il vettore delle forze della tessitura FtFt alla posizione pp può essere espresso tramite la seguente equazione: Ft(p)=Sg(p)+N,Ft(p)=Sg(p)+N, dove g(p)g(p) è una funzione implicita e deterministica, SS è un rumore moltiplicativo e NN rappresenta un rumore sovrapposto. Il rumore moltiplicativo può essere usato per scalare casualmente una funzione deterministica apportando ulteriori variazioni alla tessitura.
Filtraggio
Il filtraggio viene usato per modellare lo spettro di potenza allo scopo di ottenere una tessitura con determinate caratteristiche. Una classificazione qualitativa delle tessiture può così essere tradotta in una descrizione spettrale. Ad esempio, le tessiture possono essere ruvide, lisce, fini, granulate, regolari o irregolari; alcune di queste caratteristiche denotano periodicità, mentre altre comportano delle amplificazioni a determinate frequenze. Così, manipolando lo spettro di potenza delle primitive in input è possibile cambiare questi descrittori qualitativi. Diverse tecniche di filtraggio possono essere impiegate a tale scopo:
- I filtri lineari FIR sono filtri facili da progettare e implementare e offrono una certa flessibilità. Il modellamento di un rumore bianco può ad esempio essere fatto mediante un banco di filtri FIR passabanda (equalizzatore parametrico), nel quale i parametri impostabili sono la frequenza centrale, la larghezza di banda e il guadagno.
- I filtri IIR consentono un miglior controllo spettrale, pur essendo più complessi da progettare. Quando in input ad un filtro IIR viene dato un rumore, il sistema è anche noto come modello ARMA (autoregressive moving average).
L’implementazione del filtraggio è computazionalmente piuttosto costosa. Tale problema può essere ovviato utilizzando un pre–filtraggio, il quale permette di risparmiare tempo durante la simulazione consumando però più memoria.
Riferimenti
- Stone, R. J. (2000). Haptic Feedback: A Potted History, From Telepresence to Virtual Reality. In S. Berlin (Ed.), Haptic Human-Computer Interaction: First International Workshop, Glasgow, UK.
- Barbagli, F., Salisbury, K., & Devengenzo, R. (2003). Enabling Multifinger, Multihand Virtualized Grasping. Proc. IEEE Int’l Conf. Robotics and Automation (ICRA 03), Vol. 1, 806–815.
- Basdogan, C., Ho, C. H., & Srinivasan, M. A. (1997). A Ray-Based Haptic Rendering Technique for Displaying Shape and Texture of 3D Objects in Virtual Environments. Proc. ASME Dynamic Systems and Control Division, 61, 77–84.
- McNeely, W., Puterbaugh, K., & Troy, J. (1999). Six Degree-of-Freedom Haptic Rendering Using Voxel Sampling. Proc. ACM Siggraph, 401–408.
- Otaduy, M.A., & Lin, M. (2003). Sensation Preserving Simplification for Haptic Rendering. Proc. ACM Siggraph, 543–553.
- Srinivasan, M. A., & Basdogan, C. (1997). Haptics In Virtual Enviroments: Taxonomy, Research Status, and Challenges. Comput & Graphics, 21(4), 393–404.
- Zilles, C. B., & Salisbury, J. K. (1995). A constraint based god-object method for haptic display. IEEE International Conference on Intelligent Robots and Systems.
- Srinivasan, M. A., & Morgenbesser, H. B. (1996). Force Shading for Haptic Shape Perception. Proceedings of the ASME Dynamic System and Control Division, 58, 407–412.
- Max, N. L., & Becker, B. G. (1994). Bump shading for volume texture. IEEE Computer Graphics and Applications, (14), 18–20.
- Fritz, J. P., & Barner, K. E. (1996). Stochastic Models For Haptic Texture. Proceedings of SPIE’s International Symposium on Intelligent System and Advanced Manufactoring – Telemanipulator and Telepresence Technologies III.
- Siira, J., & Pai, D. K. (1996). Haptic texturing – a stochastic approach. International Conference on Robotics and Automation.
- Ebert, D. S., Musgrave, F. K., Peachey, D., Perlin, K., & Worley, S. (1994). Texturing and Modeling: a procedural approach. AP Professional.
- Haruyama, S., & Barsky, B. A. (1984). Using stochastic modeling for texture generation. IEEE Computer Graphics and Applications, 7–19.
