Disclaimer: Il contenuto di questo post è un estratto della mia tesi di laurea, realizzata nel 2006. Alcuni esempi potrebbero risultare obsoleti, tuttavia la componente teorica resta un buon riferimento per chi deve approcciarsi alla materia.
Scopo del lavoro
Per poter integrare la simulazione aptica di una tessitura con la simulazione sonora si è reso necessario scrivere un’applicazione che implementi tutti i concetti visti finora.
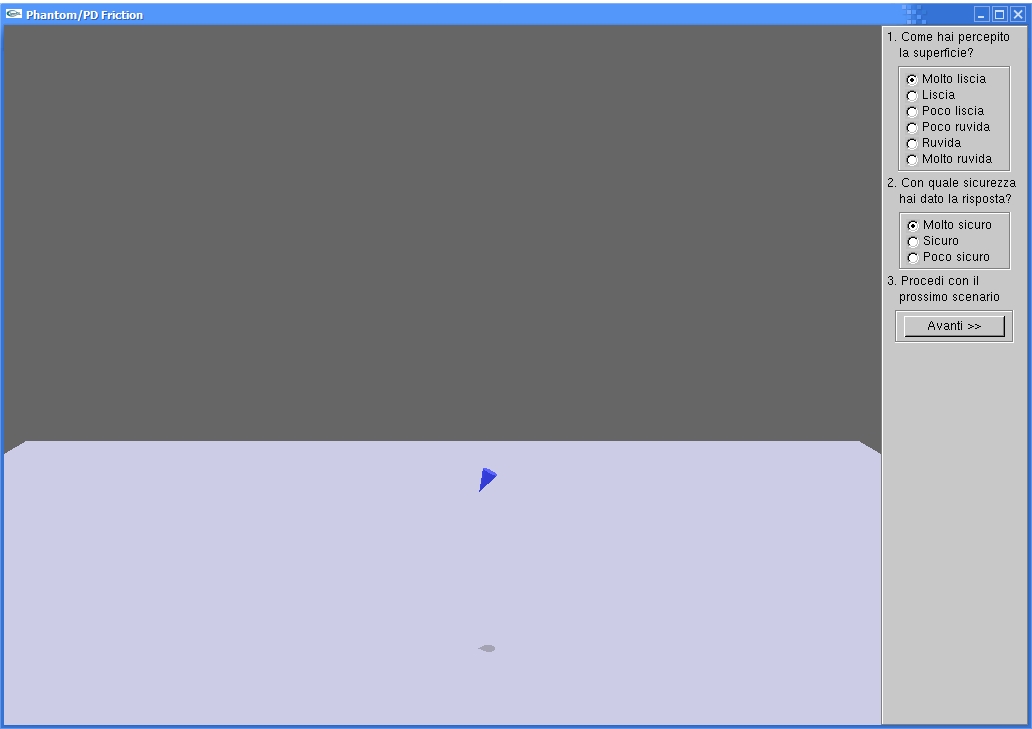
Dato che nei nostri scopi non rientra la realizzazione di particolari tessiture grafiche o nessun altro tipo di algoritmo di computer graphics, l’interfaccia (mostrata in figura) risulta molto semplice; tuttavia è chiara, user–friendly ed efficace (come vedremo) per un’interazione da parte dell’utente di tipo bimodale. Il nostro obiettivo infatti è permettere all’utente di sentire uno o più oggetti virtuali utilizzando i sensi del tatto e dell’udito; non vogliamo assolutamente fornire suggerimenti di tipo grafico, perché, come molti studi di Lederman e Klatzky (Lederman, J. S. & Klatzky, R. L., 2004) hanno dimostrato, ciò falserebbe la percezione aptica e uditiva. Secondo tali ricerche il senso della vista quasi sempre prevale sugli altri sensi quando è utilizzato per riconoscere oggetti. In particolare sembra che la vista prevalga soprattutto quando è richiesto di riconoscere le proprietà macroscopiche di un oggetto, come la sua forma o le tessiture che caratterizzano la sua superficie; il tatto invece viene usato quasi quanto la vista nel riconoscimento della ruvidità.
L’applicazione Phantom Friction è stata realizzata in C/C++, su sistema operativo Microsoft Windows. Le librerie utilizzate sono tutte multipiattaforma, quindi con poche modifiche al codice è possibile effettuare il porting su altri sistemi operativi, come Linux. Allo stesso modo le patch per Pure Data possono essere riutilizzate in Linux.
Tale applicazione implementa solamente la simulazione grafica e aptica, non la simulazione audio. Per quanto riguarda quest’ultima si sono sfruttate le patch in Pure Data già descritte: una loro nuova implementazione in un linguaggio di programmazione quale il C++ sarebbe stata problematica, in quanto sarebbe stato necessario riscrivere non solo gli algoritmi, ma anche tutte le funzioni già implementate come primitive in PD. D’altro canto non è stato possibile implementare le parti grafica e aptica in PD. Come si è detto, esistono librerie come GEM che permettono di unire la simulazione grafica a quella audio con l’utilizzo di semplici moduli che realizzano oggetti tridimensionali in OpenGL, ma non è possibile l’integrazione con le funzioni aptiche. Si potrebbe anche pensare di realizzare un oggetto per PD, appoggiandosi eventualmente alla libreria flext, che integri le funzioni aptiche e grafiche, ma ciò introdurrebbe un overhead troppo elevato, tanto da rendere la simulazione troppo pesante in termini di risorse di calcolo anche per computer potenti. Si vede quindi che la soluzione di realizzare da un lato la simulazione grafica/aptica in C/C++ e dall’altro la simulazione audio in PD risulta la scelta migliore.
Implementazione grafica
La simulazione grafica è stata realizzata in OpenGL utilizzando le librerie incluse nel toolkit OpenHaptics . Dal momento che queste librerie sono state precompilate per essere usate con l’ambiente di programmazione Visual Studio .NET di Microsoft, è necessario ricompilarle se devono essere usate con un altro ambiente. Nel nostro caso l’applicazione è stata sviluppata in Visual Studio 2005: perciò è stato necessario effettuare il download del pacchetto glui_v2_2.zip (http://glui.sourceforge.net/); una volta scompattato il file, sarà presente una directory msvc contenente i file dei progetti da aprire con Visual Studio e ricompilare.
Rappresentazione della scena
Tramite un parallelepipedo è stata rappresentata la superficie sulla quale un cursore a forma di piccolo cono (controllato tramite il Phantom Omni) può muoversi; questa superficie è piana, di un solo colore, priva di texture e non viene mai variata, in accordo con la condizione secondo la quale non devono essere dati suggerimenti visivi sul tipo di superficie. Il parallelepipedo viene creato come lista composta da un solo oggetto:
DraggableObject dro;
dro.displayList = glGenLists(1);
dro.transform = hduMatrix::createTranslation(surfx,surfy,surfz);
glNewList(dro.displayList, GL_COMPILE);
drawSurface(1000.0f, 800.0f, 20.0f, texturized);
glEndList();
draggableObjects.push_back(dro);dove il metodo drawSurface costruisce il parallelepipedo specificandone i vertici, accettando come argomenti le dimensioni del parallelepipedo lungo gli assi xx, zz e yy e un valore booleano che indica se all’oggetto deve essere applicata la texture grafica associata (tale valore è sempre impostato a falso nell’attuale implementazione). Il comando
glCallList(obj.displayList);effettua il rendering a video della superficie. E’ possibile aggiungere alla lista altri oggetti, nel caso ad esempio si volessero rappresentare più superfici o aggiungere poligoni in modo da rendere più complessa la forma della superficie; le modifiche alle proprietà aptiche e grafiche effettuate sulla lista verranno propagate contemporaneamente a tutti gli oggetti della lista. Anche il cursore, rappresentato da un cono, viene disegnato come una lista costituita da un oggetto singolo tramite la funzione:
redrawCursor(const boolean& h, const int& nShadow);il parametro booleano h deve essere impostato a 1 se si vuole che venga fatto sia il rendering grafico che aptico del cursore, mentre impostandolo a 0 verrà fatto solo il rendering grafico; il secondo parametro è utilizzato nel calcolo delle ombre. Le istruzioni per il rendering grafico sono le seguenti:
gCursorDisplayList = glGenLists(1);
glNewList(gCursorDisplayList, GL_COMPILE);
qobj = gluNewQuadric();
gluQuadricDrawStyle(qobj,GLU_FILL);
gluQuadricNormals(qobj,GLU_SMOOTH);
gluQuadricOrientation(qobj,GLU_OUTSIDE);
gluCylinder(qobj, 0, 5, 15, 30, 1);
glTranslatef(0, 0, 15);
gluDisk(qobj, 0, 5, 30, 1);
gluDisk(qobj, 0, 1, 15, 1);
gluDeleteQuadric(qobj);
glEndList();Dal momento che il proxy è rappresentato da un unico punto nello spazio, l’istruzione glTranslatef(0, 0, 15) permette di traslare il cono lungo l’asse yy in modo tale che la sua punta coincida con la posizione del proxy.
Tramite i comandi:
glBlendFunc(GL_SR_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
glEnable(GL_BLEND);
glEnable(GL_POINT_SMOOTH);
glHint(GL_POINT_SMOOTH_HINT, GL_NICEST);
glEnable(GL_LINE_SMOOTH);
glHint(GL_LINE_SMOOTH_HINT, GL_NICEST);
glEnable(GL_POLYGON_SMOOTH);
glHint(GL_POLYGON_SMOOTH_HINT, GL_NICEST);contenuti all’interno della routine initGL() è stato aggiunto il supporto all’anti–aliasing; l’effettivo uso di tale tecnica di rendering dipende tuttavia dalle impostazioni dell’hardware grafico.
Rendering delle ombre
Una caratteristica grafica che si è voluta implementare per aumentare il realismo dello scenario senza aggiungere troppi dettagli è costituita dalle ombre; questa scelta è opportuna in quanto le ombre forniscono informazioni circa la posizione degli oggetti l’uno rispetto agli altri (e rispetto alla sorgente di luce, anche quando questa non viene rappresentata nella scena), ma non forniscono informazioni circa le proprietà aptiche, il materiale di cui è costituito l’oggetto o le sue tessiture più di quanto non faccia già la rappresentazione priva di ombre.
Un’ombra viene prodotta quando una fonte di luce colpisce un oggetto che oscura un altro oggetto o una superficie; i lati del primo oggetto che non vengono colpiti dalla luce vengono rappresentati con un colore più scuro, ma di default non viene proiettata nessuna ombra sugli altri oggetti o sulle superfici. Anche se esistono diversi modi per implementare questa caratteristica, la nostra attenzione si è focalizzata su due di questi.
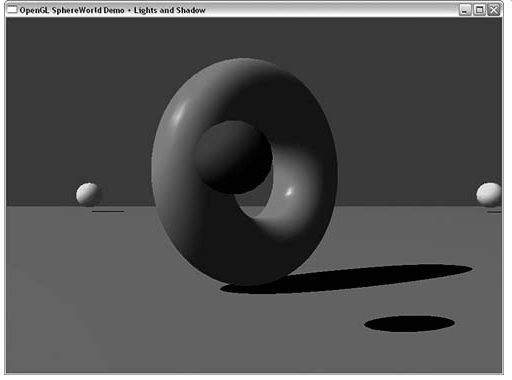
Trasposizione bidimensionale dell’oggetto
Con questo metodo, disegnare un’ombra è semplice: si crea una copia “appiattita” dell’oggetto e la si trasla secondo una matrice di trasposizione per farla giacere sullo stesso piano sul quale giace l’oggetto; la forma e la dimensione di questa trasposizione sono determinate dalla posizione della fonte di luce. Nelle librerie glTools (Wright, R. S. Jr. & Lipchak, B., 2004) è contenuta la funzione gltMakeShadowMatrix che calcola la matrice di trasposizione sul piano bidimensionale; richiede in input un vettore di tre punti giacenti sul piano sul quale si vuole far apparire l’ombra, un vettore contenente la posizione della sorgente di luce e un puntatore alla matrice di trasformazione che deve essere creata.
void gltMakeShadowMatrix(GLTVector3 vPoints[3], GLTVector4 vLightPos, GLTMatrix destMat)
{
GLTVector4 vPlaneEquation;
GLfloat dot;
gltGetPlaneEquation(vPoints[0], vPoints[1], vPoints[2], vPlaneEquation);
// Prodotto punto per punto dei vettori contenenti
// le posizioni del piano e della luce
dot = vPlaneEquation[0]*vLightPos[0] +
vPlaneEquation[1]*vLightPos[1] +
vPlaneEquation[2]*vLightPos[2] +
vPlaneEquation[3]*vLightPos[3];
// Calcolo della matrice di proiezione
// Prima colonna
destMat[0] = dot - vLightPos[0] * vPlaneEquation[0];
destMat[4] = 0.0f - vLightPos[0] * vPlaneEquation[1];
destMat[8] = 0.0f - vLightPos[0] * vPlaneEquation[2];
destMat[12] = 0.0f - vLightPos[0] * vPlaneEquation[3];
// Seconda colonna
destMat[1] = 0.0f - vLightPos[1] * vPlaneEquation[0];
destMat[5] = dot - vLightPos[1] * vPlaneEquation[1];
destMat[9] = 0.0f - vLightPos[1] * vPlaneEquation[2];
destMat[13] = 0.0f - vLightPos[1] * vPlaneEquation[3];
// Terza colonna
destMat[2] = 0.0f - vLightPos[2] * vPlaneEquation[0];
destMat[6] = 0.0f - vLightPos[2] * vPlaneEquation[1];
destMat[10] = dot - vLightPos[2] * vPlaneEquation[2];
destMat[14] = 0.0f - vLightPos[2] * vPlaneEquation[3];
// Quarta colonna
destMat[3] = 0.0f - vLightPos[3] * vPlaneEquation[0];
destMat[7] = 0.0f - vLightPos[3] * vPlaneEquation[1];
destMat[11] = 0.0f - vLightPos[3] * vPlaneEquation[2];
destMat[15] = dot - vLightPos[3] * vPlaneEquation[3];
}Moltiplicando la matrice ottenuta per la matrice della vista corrente, tutte le modifiche successive vengono trasposte sul piano. Nella nostra applicazione la sorgente di luce ha coordinate xx e zz nulle, quindi è stato necessario effettuare i calcoli relativi solo alla seconda colonna della matrice (infatti i calcoli relativi alle altre colonne restituiscono sempre 00).
Come si può ben capire, questa tecnica può essere utilizzata solo in rendering di scene nelle quali è presente un solo oggetto su un piano, oppure con più oggetti giacenti sullo stesso piano ma opportunamente spaziati (in modo che non ci si aspetti che un oggetto proietti la propria ombra su un altro), in quanto l’ombra viene proiettata solamente sul piano e non sugli altri poligoni.
Shadow mapping
Questa tecnica è più complessa, ma l’idea su cui si basa è molto semplice: le zone in ombra sono quelle che non vengono colpite dalla luce. Se poniamo il nostro punto di vista nella stessa posizione in cui si trova la luce e guardiamo nella direzione in cui quest’ultima è diretta, vediamo tutto quello che dovrà essere illuminato; ciò che non vediamo è in ombra.
Effettuando il rendering della scena dal punto di vista della sorgente di luce, otteniamo un depth buffer contenente, per ogni pixel, le informazioni circa la distanza relativa tra questa sorgente e la superficie più vicina in una certa direzione; questa superficie è illuminata, tutte quelle che si trovano oltre restano nell’ombra. L’algoritmo di shadow mapping consiste proprio nell’effettuare il rendering della scena dal punto di vista della sorgente di luce, copiare successivamente il contenuto del depth buffer in una texture, fare il rendering dal punto di vista della camera e applicare la nuova texture per determinare le zone di ombra.
Nell’applicazione Phantom Friction la tecnica di shadow mapping non viene utilizzata di default; per attivarla è sufficiente compilare il codice specificando la direttiva _SHADOWMAPPING_ per il preprocessore. L’inizializzazione è contenuta nella routine ShadowMappingInit(), la quale comprende il caricamento delle texture che non devono essere modificate e l’abilitazione dell’estensione GL_ARB_shadow (se disponibile, questa estensione consente di eseguire un passaggio in meno nel calcolo delle ombre). La funzione di callback per il ridisegno della scena è:
void glutDisplay()
{
ShadowMappingFirst(gCameraPosWC);
drawScene();
ShadowMappingSecond();
RegenerateShadowMap(light0_position, shadowSize);
}Per prima cosa vengono impostate le luci:
glLightfv(GL_LIGHT0, GL_AMBIENT, ambientLight);
glLightfv(GL_LIGHT0, GL_DIFFUSE, diffuseLight);si effettua un confronto sulle ombre e si imposta il piano della visuale corrente:
glEnable(TEXTURETYPE);
glTexEnvi(GL_TEXTURE_ENV, GL_TEXTURE_ENV_MODE, GL_MODULATE);
glTexParameteri(TEXTURETYPE, GL_TEXTURE_COMPARE_MODE,
GL_COMPARE_R_TO_TEXTURE);
glTexParameteri(TEXTURETYPE, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
glTexParameteri(TEXTURETYPE, GL_TEXTURE_MAG_FILTER, GL_NEAREST);
glEnable(GL_TEXTURE_GEN_S);
glEnable(GL_TEXTURE_GEN_T);
glEnable(GL_TEXTURE_GEN_R);
glEnable(GL_TEXTURE_GEN_Q);
glTexGenfv(GL_S, GL_EYE_PLANE, sPlane);
glTexGenfv(GL_T, GL_EYE_PLANE, tPlane);
glTexGenfv(GL_R, GL_EYE_PLANE, rPlane);
glTexGenfv(GL_Q, GL_EYE_PLANE, qPlane);Tramite i comandi:
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
gluLookAt(light[0], light[1], light[2],
0.0f, 0.0f, 0.0f, 0.0f, 1.0f, 0.0f);
glGetFloatv(GL_MODELVIEW_MATRIX, lightModelview);
glViewport(0, 0, shadowsize, shadowsize)viene spostato il punto di vista in corrispondenza della sorgente di luce. Si copia il contenuto del depth buffer in una texture bidimensionale:
glCopyTexImage2D(TEXTURETYPE, 0, GL_DEPTH_COMPONENT,
0, 0, shadowsize, shadowsize, 0);Al successivo rendering della scena si torna alla prospettiva originale con i comandi:
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(40.0f, 1.0f, 274.0f, 1899.0f);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
gluLookAt(cam[0], cam[1], cam[2], 0.0f, 0.0f, 0.0f, 0.0f, 1.0f, 0.0f);
glViewport(0, 0, windowWidth, windowHeight);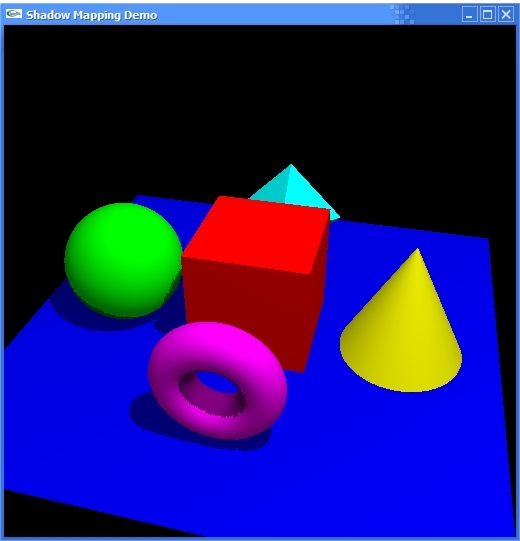
Scelta della tecnica di rendering delle ombre
Nell’applicazione Phantom Friction l’unico oggetto che deve proiettare un’ombra è il cursore, e la proietta su un piano; quindi la tecnica più adatta (e implementata di default) è la trasposizione bidimensionale. Effettuando questa scelta si è anche tenuto conto del fatto che questa tecnica è meno dispendiosa in termini di risorse di calcolo rispetto allo shadow mapping, e quindi è meno probabile che causi il verificarsi di latenze. Il cursore viene disegnato tramite il comando:
redrawCursor(true,0);poi viene trasposto e disegnato una seconda volta, questa volta come ombra:
glMultMatrixf((GLfloat *)shadowMat);
redrawCursor(true,1);L’unico inconveniente nel quale si incorre è che, se il cursore viene spostato oltre il limite della superficie, l’ombra viene disegnata lo stesso, anche se l’utente si aspetta di non vederla; per ovviare a questo problema sono state apportate due semplici modifiche:
- l’ombra viene disegnata solo se la posizione lungo l’asse $y$ del proxy è maggiore o uguale della posizione del piano lungo lo stesso asse;
- l’ombra e lo sfondo hanno lo stesso colore: in tal modo, quando l’ombra esce dalla superficie, si confonde con lo sfondo e, per l’occhio umano, non è distinguibile da questo.
Aggiunta di texture grafiche
E’ stata prevista la possibilità di aggiungere texture grafiche bidimensionali alle superfici degli oggetti, anche se ciò non rientra negli scopi dell’applicazione in quanto la percezione visiva di una tessitura distoglie l’utente dalle percezioni aptiche e uditive; tale caratteristica è disattivata per default, e per attivarla occorre procedere alla ricompilazione del codice sorgente includendo la stringa _TEXTURE tra le direttive del preprocessore.
La funzione:
loadTexture();carica in memoria tutte le texture indicate nell’array textureFiles; è sufficiente effettuare il caricamento durante l’inizializzazione dell’applicazione, successivamente le texture resteranno disponibili in memoria fino alla chiusura dell’applicazione stessa. Il comando:
glBindTexture(GL_TEXTURE_2D,textures[n]);è utilizzato per applicare effettivamente la texture in posizione $n$ nell’array all’oggetto corrente.
Implementazione aptica
Rendering aptico degli oggetti virtuali
Per l’implementazione del rendering grafico si sono utilizzate sia le HDAPI che le HLAPI. Le HLAPI sono molto utili quando si vogliono impostare le proprietà aptiche degli oggetti virtuali e per gestire i frame; ad esempio, per effettuare il rendering aptico della superficie sono sufficienti le seguenti istruzioni:
hlBeginShape(HL_SHAPE_FEEDBACK_BUFFER, obj.shapeId);
hlMaterialf(HL_FRONT_AND_BACK, HL_STIFFNESS, obj.hap_stiffness);
hlMaterialf(HL_FRONT, HL_DAMPING, obj.hap_damping);
hlMaterialf(HL_FRONT, HL_STATIC_FRICTION, obj.hap_static_friction);
hlMaterialf(HL_FRONT, HL_DYNAMIC_FRICTION, obj.hap_dynamic_friction);
glCallList(obj.displayList);
hlEndShape();con le quali vengono impostate la rigidità, il coefficiente di smorzamento, frizione statica e frizione dinamica. Le primitive grafiche utilizzate sono davvero poche, e ciò consiglia l’utilizzo del feedback buffer per il rendering aptico (e di conseguenza anche per il rendering grafico); questo viene impostato tramite il primo argomento di hlBeginShape.
Nella rappresentazione del cursore non devono essere impostate proprietà aptiche, ma è necessario calcolare le traslazioni e le trasformazioni del proxy:
hlGetDoublev(HL_PROXY_TRANSFORM, proxytransform);
glMultMatrixd(proxytransform);Tutti i comandi riguardanti il rendering grafico della superficie, del cursore e delle ombre sono contenuti all’interno di un blocco hlBeginFrame–hlEndFrame:
hlBeginFrame();
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
// disegna la superficie
drawDraggableObjects(false,0);
glPushMatrix();
glEnable(GL_LIGHTING);
glLightfv(GL_LIGHT0,GL_POSITION,lightPos);
// disegna il cursore
redrawCursor(true,0);
glPopMatrix();
glDisable(GL_DEPTH_TEST);
glDisable(GL_LIGHTING);
glPushMatrix();
// disegna l'ombra del cursore
hlGetDoublev(HL_PROXY_POSITION, posHD);
if(posHD[1] > minCursorY )
{
glMultMatrixf((GLfloat *)shadowMat);
redrawCursor(true,1);
}
// ripristina la normale prospettiva
glPopMatrix();
glEnable(GL_DEPTH_TEST);
hlEndFrame();Sempre utilizzando le HLAPI è stata abilitata l’ottimizzazione haptic camera view:
hlEnable(HL_HAPTIC_CAMERA_VIEW);in modo che venga effettuato il rendering aptico anche della porzione di superficie non visibile nella scena. Con l’istruzione:
hlHinti(HL_SHAPE_FEEDBACK_BUFFER_VERTICES, 100);viene allocata memoria per 100 vertici, sufficienti per la rappresentazione in feedback buffer delle poche primitive usate; ciò si traduce in un risparmio di memoria in quanto di default viene riservata memoria sufficiente per 65536 vertici.
Rilevamento dei contatti e rendering delle tessiture aptiche
Tutte le istruzioni viste fino a questo punto sono sufficienti a fare in modo che, tramite l’uso del Phantom Omni , il parallelepipedo possa essere avvertito come un oggetto solido, senza la possibilità di penetrarlo. Tuttavia le proprietà aptiche restano costanti lungo tutta la superficie dell’oggetto; se si aggiunge il fatto che tale superficie è piana, si può intuire come questa sia costituita da una tessitura aptica uniforme su tutto l’oggetto. Durante la simulazione bimodale (cioè quando le simulazioni aptica e sonora sono eseguite contemporaneamente) si viene ad avvertire così una superficie che al tatto si presenta come costantemente ruvida (con livello di ruvidità proporzionale ai valori scelti di frizione statica e dinamica) accompagnata da suoni di sfregamento che descrivono una tessitura frattale e non costante. La discrepanza tra le due modalità non è avvertibile quando vengono simulate superfici lisce o poco ruvide, mentre si fa più evidente all’aumentare della ruvidità. Sono state valutate le seguenti metodologie per l’effettiva implementazione di una tessitura aptica.
Modifica della geometria della superficie
La superficie viene avvertita apticamente come piana in quanto graficamente è piana. Un modo per far avvertire una superficie ruvida è modificarne la geometria, con l’aggiunta ad esempio di diversi poligoni a forma di piccoli coni che ne rappresentino le asperità; aggiungendo queste primitive alla lista contenente il parallelepipedo, tutti gli oggetti avranno le stesse proprietà aptiche e verranno rappresentati (sia dal punto di vista grafico che dal punto di vista aptico) come un unico oggetto. Disponendo i piccoli coni in modo opportuno, si ottiene una superficie che può essere avvertita come ruvida da entrambi i punti di vista aptico e grafico, e il livello di ruvidità dipende dalla dimensione, quantità e disposizione dei coni.
Tale soluzione però contrasta con i nostri scopi in quanto si dà un chiaro suggerimento visivo all’utente sulla tipologia di superficie, facendo passare totalmente in secondo piano le caratteristiche aptiche e sonore.
Si potrebbe pensare di rappresentare le asperità (cioè i piccoli coni) solo dal punto di vista aptico e non da quello grafico; dato che anche tutte le primitive vengono rappresentate come oggetti solidi (e quindi non penetrabili dalla sonda), con tale metodo si verrebbero a creare zone in cui il proxy si “blocca” senza urtare la porzione di superficie rappresentata graficamente (si verifica un urto aptico ma non un urto grafico), portando ad una notevole discrepanza tra le componenti aptica/grafica e creando di conseguenza solo confusione nell’utente.
Modifica delle proprietà aptiche secondo pattern geometrici
Una seconda soluzione consiste nel modificare le proprietà aptiche della superficie lungo la superficie stessa, invece di mantenerle costanti. Il coefficiente di rigidità non può essere variato in quanto il parallelepipedo che rappresenta la superficie deve essere avvertito sempre come solido; la modifica del coefficiente della forza di smorzamento non influenza il rendering aptico in questa implementazione; quindi gli unici due parametri che possono essere variati sono le frizioni statica e dinamica. Entrambe sono forze che si oppongono al movimento tangenziale di un corpo.
Se pensiamo ad una superficie liscia come una superficie sulla quale i corpi strisciano senza incontrare resistenza, mentre pensiamo ad una superficie ruvida come una superficie sulla quale gli oggetti strisciano incontrando una forza di resistenza ogniqualvolta urtano un’asperità, allora vediamo come un aumento improvviso del coefficiente di frizione statica in alcuni punti può simulare la presenza di asperità in questi stessi punti, senza ricorrere a variazioni della geometria dell’oggetto.
In una prima implementazione si è scelto di mantenere i coefficienti delle due frizioni costanti e inferiori a 0.5 (ricordiamo che i coefficienti possono assumere valori compresi tra 0 e 1) nella simulazione di superfici lisce o poco lisce. Per le superfici ruvide i coefficienti vengono mantenuti ad un valore basso (0.2) e incrementati solo in alcuni punti, determinati in base alle coordinate geometriche del punto stesso: se il cursore si trova a contatto con la superficie e la sua posizione lungo l’asse xx soddisfa la condizione:
(( (int)posHD[0]*10 ) % 2) != 0(dove posHD[0] indica la posizione del proxy lungo l’asse xx) allora la frizione viene impostata ad un valore tanto più elevato quanto più ruvida deve risultare la superficie. Dal momento che si considera solo l’asse xx, le asperità vengono posizionate lungo linee parallele all’asse zz e giacenti sullo stesso piano della superficie (ovvero quello determinato dagli assi xx e zz).
Se la precedente condizione viene sostituita dalla seguente:
( (int)( sqrt(posHD[0]*posHD[0]+posHD[2]*posHD[2])*10 ) % 2) != 0(dove posHD[0] indica ancora la posizione del proxy lungo l’asse xx, mentre posHD[2] indica la posizione lungo l’asse zz), le asperità vengono posizionate secondo cerchi concentrici giacenti sul piano xzxz.
Possono essere implementati facilmente altri pattern geometrici; i micro–contatti dei quali viene simulato il suono emesso non sono però disposti secondo pattern regolari, ma casualmente secondo un pattern frattale. Rimane quindi una certa discrepanza tra le sensazioni aptiche e le sensazioni uditive per superfici non lisce.
Modifica delle proprietà aptiche secondo pattern frattali
Il passo successivo consiste nella creazione di una tessitura aptica frattale.
Si potrebbe pensare di scrivere una funzione che implementi l’algoritmo discusso nel post sui modelli audio; ciò introdurrebbe un ulteriore appesantimento nel carico computazionale, senza garantire che il pattern generato nella patch per PD e quello implementato nell’applicazione varino concordemente. Il metodo più semplice e più efficiente risulta invece quello di utilizzare i dati calcolati nella subpatch holy-roller~. Il blocco circ_max_filter~ calcola il profilo della superficie sulla quale avvengono i micro–contatti; il valore inviato in output viene letto dall’applicazione Phantom Friction (vedremo nella prossima sezione come avviene questa lettura) e, opportunamente scalato, viene utilizzato come coefficiente di proporzionalità per i valori di frizione statica e dinamica.
Nella sezione “Rendering delle tessiture aptiche” di questo post sono state analizzate diverse tecniche di rendering delle tessiture. Quella qui implementata può essere descritta come una perturbazione delle forze (senza l’utilizzo della formula di Max e Becker); inoltre, in modo simile a quanto avviene per le tessiture aptiche basate sulle immagini, come indicatore della profondità della tessitura viene usato il valore del profilo della superficie calcolato nelle patch in Pure Data.
Per implementare questo procedimento sono state utilizzate tre funzioni di callback. La prima rileva il verificarsi del primo contatto tra proxy e superficie e imposta a true un valore booleano:
void HLCALLBACK touchCallback(HLenum event,
HLuint object,
HLenum thread,HLcache *cache,
void *userdata)
{
touching = true;
}La seconda invece imposta questo valore a false quando il proxy non è più in contatto con la superficie:
void HLCALLBACK untouchCallback(HLenum event,
HLuint object,
HLenum thread,
HLcache *cache,
void *userdata)
{
touching = false;
}Tale valore booleano viene usato dalla terza funzione di callback come condizione di abilitazione del calcolo (e del conseguente invio alla patch in PD) della velocità corrente e del fattore di amplificazione proporzionale alla forza normale.
HDCallbackCode HDCALLBACK velocitaCallback(void *pUserData)
{
if ( touching )
{
// richiesta della velocità corrente
hdGetDoublev(HD_CURRENT_VELOCITY, veloHD);
// richiesta della forza corrente
hdGetDoublev(HD_CURRENT_FORCE, forceHD);
velocita = sqrt( pow(veloHD[0],2) + pow(veloHD[2],2) );
// scrittura in memoria dei dati aptici dello scenario
setOpeData( &data,
(float)( sqrt( abs(velocita * forceHD[1]) )/1000 ),
velocita/1000,
0,
sceneDepth[indexScene],
0,
0,
sceneNoiseFile[indexScene]);
WriteOpeData(&data);
pdSurface = ReadSurface();
hap_static_friction = ( pdSurface - a )/ ( b );
}
else
{
setOpeData( &data, 0, sceneDepth[indexScene], 0, 0,
0, 0, sceneNoiseFile[indexScene]);
WriteOpeData(&data);
}
return HD_CALLBACK_CONTINUE;
}Questa callback è stata implementata utilizzando le HDAPI come callback asincrona, in modo tale che venga eseguita non appena viene schedulata. Ciò è importante in quanto qui vengono generate le tessiture aptiche, e tale funzione deve essere eseguita alla velocità propria del rendering aptico, applicando l’effetto ad ogni iterazione del servo loop. L’istruzione
hap_static_friction = ( pdSurface - a )/ ( b );imposta i coefficienti di frizione al valore ricevuto da PD (pdSurface) e opportunamente scalato nell’intervallo (a,b), dove a è impostato a 00 (si suppone che la superficie abbia sempre un valore positivo) e b corrisponde a 0.040.04 (calcolato empiricamente). La velocità viene calcolata come modulo delle componenti lungo gli assi xx e zz (il piano su cui giace la superficie) e viene divisa per 1000 per adeguarla alle unità di misura usate dalla patch sliding.pd: in quest’ultima la velocità è assunta in m/sm/s, mentre le HDAPI ritornano tale valore in mm/smm/s. Tramite l’istruzione:
sqrt( abs(velocita * forceHD[1]) ),dove forceHD[1] è la componente della forza esercitata dal dispositivo aptico lungo l’asse yy, viene calcolato il fattore di proporzionalità dell’ampiezza del suono rispetto alla forza normale (vedi pagina ).
Scambio dei dati tra l’applicazione Phantom Friction e le patch in Pure Data
Punto cruciale dello sviluppo di questa applicazione è stata l’implementazione di un’interfaccia di comunicazione con Pure Data, in modo da consentire lo scambio dei dati tra i due processi in tempo reale durante la simulazione bimodale. E’ stato importante curare questo aspetto perché la comunicazione dei dati deve avvenire alla stessa frequenza del rendering aptico, quindi 1000 volte al secondo; se le operazioni di scambio di informazioni svolte ad ogni ciclo sono troppo onerose, si rischia di introdurre latenze eccessive.
La simulazione bimodale ha significato se gli stimoli aptico, visivo e uditivo vengono percepiti dall’utente simultaneamente. Possiamo distinguere tre momenti ad ogni ciclo della simulazione: il momento in cui il proxy incontra una asperità, il momento in cui il dispositivo aptico rileva questo contatto e invia una forza in retroazione e il momento in cui viene generato il suono per questo evento. Tutti e tre i momenti elencati devono essere distanti (nel tempo) tra di loro il meno possibile, in accordo con la percezione dell’utente; se uno dei tre momenti è temporalmente troppo distante dagli altri (si verifica cioè una latenza), lo stimolo associato verrà percepito come estraneo all’evento. Se invece tutti e tre gli stimoli si verificano con latenze minori di certi livelli, allora verranno percepiti come contemporanei e l’utente li individuerà come componenti di uno stesso evento.
Si possono distinguere latenze intramodali e latenze intermodali:
- latenze intramodali: le latenze intramodali si verificano tra stimoli dello stesso tipo: tra due stimoli sonori, tra due stimoli aptici o tra due stimoli visivi; i valori di latenza minimi percepibili variano a seconda della modalità considerata e corrispondono a 2 millisecondi per il suono, 27 millisecondi per il tatto e 43 millisecondi per la vista (Levitin, D. J., Mathews, M. V., & MacLean, K., 1999);
- latenze intermodali: le latenze intermodali si verificano tra stimoli di tipo diverso (ad esempio si considera la latenza dello stimolo sonoro rispetto agli stimoli visivo e aptico), e i valori minimi sono diversi a seconda che lo stimolo preceda o segua gli altri: se un suono precede gli stimoli visivo e aptico, la massima latenza accettata è di 25 millisecondi, mentre se li segue tale latenza sale a 42 millisecondi (Levitin, D. J., Mathews, M. V., & MacLean, K., 1999).
Se consideriamo che Pure Data, sintetizzando i suoni a 44100 Hz e avendo un buffer di 64 campioni, introduce una latenza di 1,45 millisecondi, mentre nell’applicazione Phantom Friction l’uso delle HLAPI introduce una latenza di 10 millisecondi (per le HDAPI la latenza è di 1 millisecondo), si vede che resta un margine di circa 15 millisecondi per una discrepanza temporale tra gli stimoli che sia accettabile.
Le soluzioni per la comunicazione tra i due processi sono essenzialmente tre (Crosato, P., 2006).
Protocollo di rete
Dato che in Pure Data è supportata la lettura dei dati (via protocollo TCP e UDP) tramite l’oggetto netreceive~, sarebbe sufficiente implementare la lettura/scrittura dei dati nell’applicazione Phantom Friction tramite l’uso dei socket. Il vantaggio è che i due processi potrebbero così comunicare anche in remoto, facendo eseguire la simulazione aptica e quella sonora su due macchine diverse. Lo svantaggio è che la latenza dipende fortemente dalle caratteristiche dell’interfaccia di rete della macchina e dal traffico presente sulla rete. Inoltre viene ridotta la portabilità del codice, in quanto la programmazione dei socket in C++ è dipendente dal sistema operativo.
Driver di periferica
Si potrebbe creare un external per Pure Data che legga i dati utilizzando i driver del dispositivo Phantom Omni . Questa soluzione è notevolmente complessa, a causa della scarsità di documentazione in merito e a causa del fatto che non si potrebbero estrarre i dati relativi alla geometria degli oggetti e agli istanti di collisione. Inoltre resterebbe irrisolto il problema di poter leggere i dati di Pure Data tramite l’applicazione Phantom Friction.
Memoria condivisa
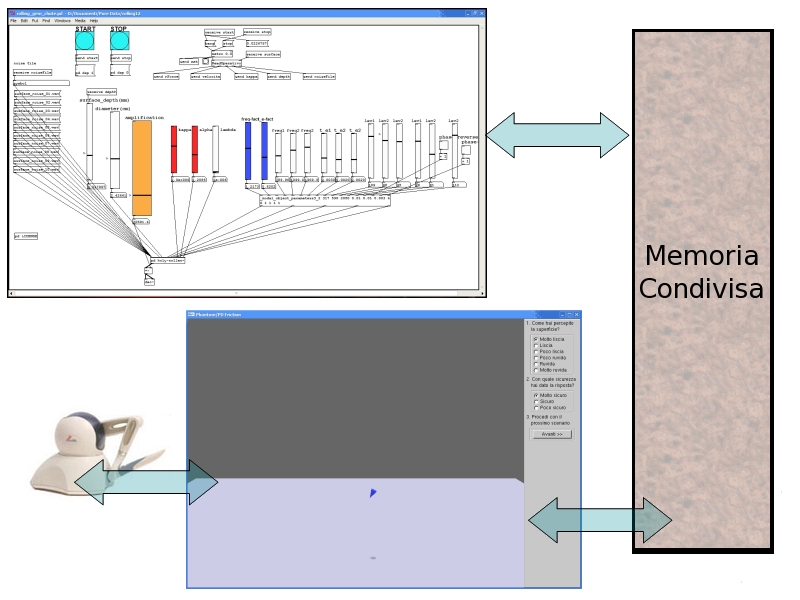
La tecnica più efficiente si è rivelata la predisposizione di un’area di memoria condivisa per la lettura/scrittura dei dati da parte di entrambi i processi. Lo svantaggio di questa soluzione è che dipende dalla piattaforma sulla quale il programma viene eseguito; inoltre Pure Data non possiede un oggetto interno che implementi una funzione utile allo scopo, perciò è stato necessario scrivere un external. Il vantaggio maggiore (che compensa gli svantaggi citati) è la velocità con la quale avvengono le operazioni di lettura e scrittura.
In particolare è stata creata una struttura dati che contenga tutti i valori che dovranno essere trasferiti dall’applicazione Phantom Friction a Pure Data:
typedef struct
{
double nForce;
double velocita;
float kappa;
float depth;
float statFr;
float dynFr;
int noiseFile;
} OpeData;I valori che costituiscono la struttura OpeData sono i seguenti:
nForceè la radice quadrata del prodotto tra forza normale e velocità;velocitaindica la velocità corrente del proxy in $m/s$;kappaè il coefficiente di elasticità della superficie;depthè il fattore di amplificazione del segnale di rumore frattale;statFrè il coefficiente di frizione statica;dynFrè il coefficiente di frizione dinamica;noiseFileè un numero intero che indica l’indice del file contenente il rumore frattale.
Nell’implementazione attuale solo i valori nForce, velocita, depth e noiseFile vengono effettivamente utilizzati. Infatti la patch in PD non ha bisogno di conoscere i coefficienti di frizione statica e dinamica, mentre il coefficiente di elasticità resta invariato per scelte implementative. E’ possibile modificare i valori che fanno parte della struttura dati tramite la funzione:
void setOpeData(OpeData *data, double nForce,
double velocita, float kappa,
float depth, float statFr,
float dynFr, int noiseFile)
{
data->nForce=nForce;
data->velocita=velocita;
data->kappa=kappa;
data->depth=depth;
data->statFr=statFr;
data->dynFr=dynFr;
data->noiseFile=noiseFile;
}La gestione della memoria è implementata nel file PhantomMemory.h. Tramite la seguente funzione avviene la creazione dell’area di memoria condivisa tra i processi:
HANDLE hFile;
int CreatePhantomMemory()
{
hFile = CreateFileMappingW(INVALID_HANDLE_VALUE,NULL,PAGE_READWRITE,
0,sizeMem,(LPCWSTR)"PhantomMemory");
if (hFile == NULL)
{
printf("ERROR: Unable to create a fileMapping.\n");
return 1;
}
hView = MapViewOfFile(hFile,FILE_MAP_ALL_ACCESS,0,0,0);
if (hView == NULL)
{
printf("ERROR: Unable to map a viewOfFile.\n");
return 2;
}
return 0;
}E’ importante fare attenzione al parametro sizeMem, il quale indica la dimensione dell’area di memoria condivisa e viene utilizzato anche per calcolare la posizione dei diversi dati in memoria; un valore errato di sizeMem porta alla scrittura e lettura di dati errati.
Il codice seguente si occupa dell’apertura e chiusura dell’area di memoria:
int OpenPhantomMemory(void)
{
hFile = OpenFileMappingW(FILE_MAP_ALL_ACCESS,FALSE,
(LPCWSTR)"PhantomMemory");
if (hFile == NULL)
{
printf("ERROR: Unable to open the FileMapping.\n");
return 3;
}
hView = MapViewOfFile(hFile,FILE_MAP_ALL_ACCESS,0,0,0);
if (hView == NULL)
{
printf("ERROR: Unable to open the FileMapping.\n");
return 4;
}
hookOped = (OpeData*)(hView);
hookSurface = (float*)(hookOped+1);
return 0;
}
int ClosePhantomMemory(void)
{
if (!UnmapViewOfFile(hView))
{
printf("ERROR: Could not unmap viewOfFile.\n");
return 5;
}
CloseHandle(hFile);
return 0;
}Un oggetto OpeData può essere scritto in memoria e letto dalla memoria usando le due funzioni WriteOpeData(OpeData *elemento) e ReadOpeData() (nella prima deve essere passato come parametro un puntatore all’oggetto):
void WriteOpeData(OpeData *elemento)
{
hookOped->nForce = elemento->nForce;
hookOped->velocita = elemento->velocita;
hookOped->kappa = elemento->kappa;
hookOped->depth = elemento->depth;
hookOped->statFr = elemento->statFr;
hookOped->dynFr = elemento->dynFr;
hookOped->noiseFile = elemento->noiseFile;
}
OpeData ReadOpeData()
{
return *hookOped;
}Con semplici modifiche a questi due comandi si implementano la scrittura e lettura del valore della superficie generata dall’oggetto circ_max_exp~:
void WriteSurface(float *elemento)
{
*hookSurface = *elemento;
}
float ReadSurface()
{
return *hookSurface;
}La scrittura e la lettura della memoria da parte dell’applicazione Phantom Friction
E’ l’applicazione Phantom Friction che si occupa di creare l’area di memoria condivisa, e lo fa non appena viene avviata; subito dopo la memoria viene aperta e si crea un oggetto data di tipo OpeData contenente tutti i valori impostati a 00, il quale viene scritto assieme ad un valore nullo di pdSurface allo scopo di effettuare un’inizializzazione della memoria stessa, cancellando eventuali dati presenti. All’interno della callback asincrona velocitaCallback, dopo aver calcolato i valori necessari alla impostazione corretta dell’oggetto data, avvengono in sequenza le seguenti operazioni:
- viene scritto in memoria l’oggetto
data; - viene letto dalla memoria il valore
pdSurface; - vengono calcolati i coefficienti di frizione statica e dinamica correnti.
Si è scelto di non fare un’apertura e una chiusura della memoria per ogni ciclo di queste operazioni, in primo luogo per evitare conflitti con le operazioni di lettura e scrittura svolte dalla patch in Pure Data; in secondo luogo ciò comporterebbe un overhead considerevole nel carico computazionale; basti pensare che, su un PC dotato di processore Intel Core Duo T2400 con 2GB di RAM, un milione di cicli lettura/scrittura con apertura/chiusura della memoria richiede tra i 12 e i 13 secondi, mentre eliminando l’apertura/chiusura della memoria si scende a tempi dell’ordine di pochi millisecondi.
La scrittura e la lettura della memoria da parte delle patch in Pure Data
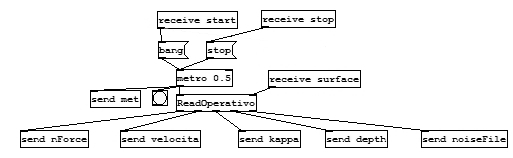
Per consentire alle patch in Pure Data di leggere e scrivere dati in RAM è stato necessario scrivere un external; per semplicità ci si è appoggiati alla libreria flext discussa nel post sui modelli audio. Tale oggetto è stato chiamato ReadOperativo; non necessita di argomenti di costruzione e possiede 2 inlet e 5 outlet: i due inlet ricevono rispettivamente un bang e il valore della superficie, mentre vengono mandati in output, in ordine:
- la radice quadrata del prodotto tra la velocità e la forza normale;
- la velocità corrente del proxy;
- il coefficiente di elasticità;
- il fattore di amplificazione del rumore frattale;
- il nome del file contenente il rumore frattale.
Tutto ciò viene inizializzato tramite il costruttore:
ReadOperativo::ReadOperativo()
{
// aggiunta degli inlet
AddInAnything("bang");//(0)
AddInFloat("surface");//(1)
// aggiunta degli outlet
AddOutFloat("nForce");//(0)
AddOutFloat("Velocita'");//(1)
AddOutFloat("Kappa");//(2)
AddOutFloat("Depth");//(3)
AddOutSymbol("NoiseFile");//(4)
// inizializzazione delle variabili
lastResult = 0;
lastDepth = 0;
fileName = "";
open = false;
// registrazione dei metodi
FLEXT_ADDBANG(0,ope_bang);
FLEXT_ADDMETHOD(1,writeSurface);
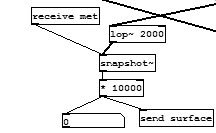
}Un oggetto metro invia un bang all’oggetto ReadOperativo ogni 0.5 millisecondi. Al primo bang ricevuto avviene l’apertura dell’area di memoria condivisa. Un ciclo di lettura e scrittura avviene ogni volta che viene ricevuto un bang, quindi la frequenza con la quale avvengono queste operazioni è di 2 KHz. Ai primi due outlet i valori vengono inviati aggiornati ad ogni ciclo, mentre i restanti vengono inviati solo quando vengono modificati; ciò è in accordo con il fatto che i primi due valori sono misure istantanee, mentre gli altri sono parametri che riguardano uno scenario e restano invariati all’interno dello stesso scenario.
Il valore della superficie non viene scritto direttamente in memoria, ma viene prima filtrato attraverso un filtro passa–basso a 2 KHz, in modo da evitare il verificarsi di aliasing.
Infine il distruttore si occupa della chiusura della memoria condivisa, che pertanto viene effettivamente chiusa solo alla chiusura della patch sliding.pd (e solo se era stata aperta):
ReadOperativo::~ReadOperativo()
{
if(open)
ClosePhantomMemory();
}Analisi delle prestazioni
Grazie alle scelte implementative fatte, si è giunti ad un’applicativo che consente una simulazione bimodale realistica. Le latenze sono ridotte entro i limiti mediamente accettabili dall’uomo, quindi l’utente percepisce gli stimoli visivo, aptico e sonoro come stimoli coerenti. Le prove sono state effettuate con un PC notebook dotato di processore Intel Core Duo T2400 e 2 GByte di memoria RAM; tuttavia la scheda audio è di fascia medio–bassa, e nonostante ciò le prestazioni restano soddisfacenti. Utilizzando un hardware audio di fascia alta sicuramente i valori di latenza degli stimoli sonori verrebbero ridotti al minimo, permettendo l’uso della simulazione anche su PC meno potenti.
Riferimenti
- Lederman, J. S., & Klatzky, R. L. (2004). Multisensory Texture Perception. In Calvert, G. A., Spence, C., & Stein, B. E. (Eds.), The Handbook Of Multisensory Processes (pp. 107–122). MIT Press.
- Wright, R. S. Jr., & Lipchak, B. (2004). OpenGL® SuperBible, Third Edition. Sams Publishing.
- Levitin, D. J., Mathews, M. V., & MacLean, K. (1999). The perception of cross-modal simultaneity. In Proc. of International Journal of Computing Anticipatory Systems.
- Crosato, P. (2006). Una piattaforma per il rendering audio–aptico di interazioni di contatto.

